Ensamble Configuracion Robot Arduino 4wd

Un robot basado en Arduino/ESP32 capaz de evitar obstáculos, seguir líneas, seguir y mostrar video en tiempo real desde una cámara.
Un robot evasor de obstáculos es un robot totalmente autónomo capaz de evitar cualquier obstáculo que encuentre al moverse. Al encontrarse con un obstáculo durante su avance, se detiene automáticamente y retrocede. Luego, mira a ambos lados, izquierdo y derecho, y comienza a moverse en la mejor dirección posible, ya sea hacia la izquierda si hay otro obstáculo a la derecha, o hacia la derecha si hay otro obstáculo a la izquierda. Este robot evasor de obstáculos es muy útil y es la base de muchos proyectos a gran escala, como automóviles automáticos, robots utilizados en fábricas e incluso en naves espaciales.
Un robot de seguimiento de línea utiliza algunos sensores de proximidad infrarrojos para detectar la línea y, en función de la información recibida de los sensores, el Arduino dirigirá los motores para que se muevan con la ayuda de un controlador de motor.
Un robot de seguimiento utiliza sensores de proximidad que detectan cualquier objeto cercano y lo siguen. Si te acercas al robot, este comenzará a seguirte. Este robot consta de un sensor ultrasónico y un sensor infrarrojo que ayudan a seguir el objeto. Es similar a un robot que evita obstáculos, pero con un funcionamiento inverso. Utiliza dos sensores infrarrojos y un sensor ultrasónico. Los sensores infrarrojos siguen a la persona o al objeto, y el sensor ultrasónico lo hace retroceder.
Un robot Bluetooth se puede controlar mediante un dispositivo Bluetooth conectado a Arduino. Desarrollé una aplicación para Android que controla la dirección del robot y activa el modo de acción.
La placa ESP32 puede transmitir video en tiempo real por wifi. Desarrollé una aplicación para Android que permite ver videos en tiempo real durante el movimiento del robot. Puedes usar el robot como un dispositivo IoT.
Suministros
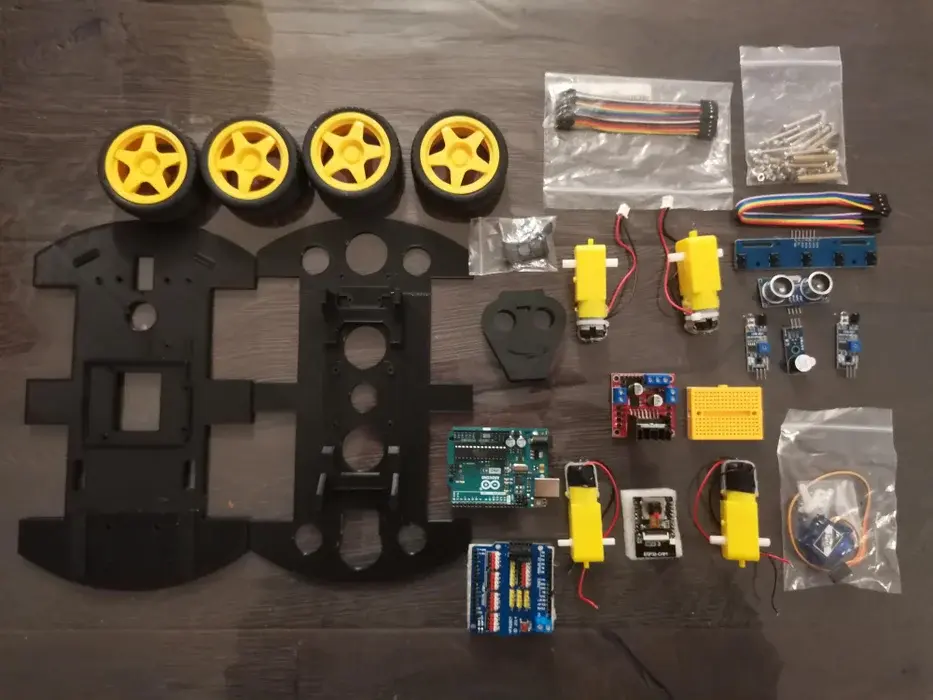
Arduino Uno + cable de Programacion 1 pieza
Arduino Sensor Shield V5.0 1 pieza
Puente H doble L298N 1 ud.
Motor DC 3V-6V 4 piezas
Ruedas de plástico 65x26mm 4 piezas
Módulo de seguimiento 5 V, 5 vías, 1 unidad
Sensor IR 1 pieza
Módulo zumbador 1 ud.
Sensor de ultrasonidos HC-SR04 1 ud.
Micro servo SG90 1 ud.
Cámara Esp32 WiFi 1 unidad (Opcional)
Módulo Bluetooth HC-05 1 ud
Portapilas 1 ud.
Cable hembra-hembra 20 piezas
Tornillos M2-M3 y tuercas
Piezas Necesarios en platicos para el ensamble
1 parte superior del chasis (2 piezas pegadas)
1 parte inferior del chasis (2 piezas pegadas)
1 soporte facial HC-SR04/ESP32
1 pinza para ajuste del modulo ESP32
Paso 1: Montaje del chasis inferior
Coloque el chasis inferior sobre un plano y monte el Dual H Bridge L298N sobre él (use 4 tornillos).
Tenga en cuenta la orientación del puente Dual H (ver imagen como referencia).
Monte el motor de CC 4 en el chasis usando el tornillo y la tuerca más largos (ver imagen como referencia).
Conecte los 4 motores de CC al puente H doble L298N siguiendo el esquema. Recuerde que el puente H doble L298N puede controlar 2 motores de CC y que debemos conectar los motores derecho e izquierdo.
Monte el módulo de seguimiento de 5 V de 5 vías en la parte frontal del chasis inferior utilizando el orificio (ver imagen como referencia). Para este paso, utilice los dos espaciadores impresos y dos tuercas/tornillos M2.
Atornille los 4 separadores M3 x 50 mm al chasis inferior con el tornillo M3 pequeño. Este separador se usará para fijar el chasis inferior al chasis superior.
Paso 2: Montaje del chasis superior



Coloque el chasis superior sobre un plano y monte la placa Arduino sobre él (use 4 tornillos).
Coloque el Arduino Sensor Shield V5.0 en la parte superior de la placa Arduino teniendo cuidado de que los pines correspondientes estén acoplados entre sí.
Monte los dos sensores IR en el chasis con el tornillo. Utilice los soportes del chasis para orientar el sensor 30°. Este paso es importante porque los sensores IR se utilizan para detectar obstáculos a los lados derecho e izquierdo del robot.
Monte el Micro servo SG90 en el orificio cuadrado del chasis. Use 2 tornillos para fijarlo.
Monte el módulo del zumbador en el chasis con el tornillo. Utilice el soporte para la orientación correcta.
Monte el soporte de la batería en el chasis con los 2 tornillos. Utilice el soporte para la orientación correcta.
Ya has ensamblado los chasis superior e inferior. ¡Buen trabajo!
Continuemos con el otro paso.
Paso 3: Preparación del sensor ultrasónico y la cámara ESP32



Utilice el soporte facial impreso en 3D e inserte el sensor de ultrasonido HC-SR04 en los 2 orificios redondos.
A continuación monta el soporte en el micro servo que ya está instalado en el chasis.
Conecte el sensor de ultrasonido HC-SR04 utilizando 4 cables hembra-hembra.
Monte la cámara ESP32 en el soporte facial impreso en 3D.
Conecte la cámara ESP32 usando 2 cables hembra-hembra (5 V y GND).
Paso 4: Cableado de componentes



Ahora podemos empezar a cablear el Smart Car.
Antes de ensamblar el chasis, tenemos que cablear el componente en la parte inferior del chasis para poder usar el orificio para pasar.
Conecte el módulo de seguimiento de 5 V y 5 vías en el chasis inferior utilizando un cable hembra-hembra de 5 pines.
Conecte el puente H doble L298N en el chasis inferior utilizando 6 cables hembra-hembra.
Conecte el puerto GND, 5V usando 2 cables macho-macho.
Conecte el puerto GND de 12 V del puente H doble al soporte de la batería. Importante: Apague el interruptor de encendido.
Ahora puedes usar el orificio del chasis superior para pasar el cable hembra-hembra que instalaste anteriormente. No olvides el cable del microservo.
Coloque el chasis superior en la parte superior y fíjelo con el chasis inferior usando un tornillo M3.
Ahora podemos continuar cableando el otro componente en el chasis superior.
Conecte ambos sensores IR en el chasis superior utilizando 3 cables hembra-hembra para cada uno.
Conecte el módulo del zumbador en el chasis superior utilizando 3 cables hembra-hembra.
Intente unir todos los cables usando un elástico o algo similar.
Detalle del cableado:
Controlador de motor L298N:
+12 V → Batería de lipo (+)
GND → Batería Lipo (- ) importante: conectar el GND a la batería lipo (-) y a cualquier pin GND de la placa Arduino
+5 V → Vin de Arduino
EnA → pin digital 3 de arduino
In1 → pin digital 4 de Arduino
In2 → pin digital 5 de Arduino
In3 → pin digital 6 de Arduino
In4 → pin digital 7 de Arduino
EnB → pin digital 11 de Arduino
OUT1 → Motor FWD+BWD Derecha
OUT2 → Motor FWD+BWD Derecha
OUT3 → Motor FWD+BWD Izquierda
OUT4 → Motor FWD+BWD Izquierda
Módulo zumbador:
GND → arduino G
VCC → arduino V
E/S → pin digital 13 de Arduino
Microservo:
GND → arduino G
VCC → arduino V
EN → pin digital 12 de arduino
Sensor IR derecho:
GND → arduino G
VCC → arduino V
SALIDA → pin digital 2 de arduino
Sensor IR izquierdo:
GND → arduino G
VCC → arduino V
SALIDA → pin digital 8 de arduino
HC-SR04 Ultrasónico
Sensor de sonar:
VCC → Arduino URF +5V
Trig → pin analógico 2 del URF de Arduino
Eco → pin analógico 3 del URF de Arduino
GND → Arduino URF GND
Módulo de seguimiento:
GND → arduino G
5 V → Arduino V
OUT2 → pin analógico 4 de Arduino
OUT3 → pin analógico 1 de Arduino
OUT4 → pin analógico 0 de Arduino
Módulo Bluetooth HC-06
GND → arduino G
5 V → Arduino V
TX → arduino RX
RX → TX de Arduino
Cámara ESP32
GND → arduino G
5 V → Arduino V
RX → arduino TX importante: al conectarlo debes desconectar el Bluetooth
Paso 5: Placa de pruebas con lector de voltaje

Monte la mini placa de pruebas en el chasis superior usando el adhesivo.
Conecte el puerto de 12 V del puente H dual a la placa de pruebas mediante un cable macho-macho.
Voltaje de la batería (conexión en serie con resistencia de 100k y 1M)
Resistencia de 100k → 12 V
Resistencia de 100 kJ/1 M → pin analógico 5 de Arduino
Resistencia de 1 M → arduino G
¡La mini placa de pruebas también se puede utilizar para tus propios experimentos!
Paso 6: Completar el montaje



Ahora ya puedes completar el trabajo ensamblando las 4 ruedas de plástico y agrupando todos los cables.
Paso 7: Programación de Arduino UNO

Cuando se complete la carga, el código comenzará a ejecutarse.
El mini servo se posicionará a 90°.
Importante: vuelva a colocar el soporte facial en el servo si es necesario.
Ahora puedes probar el movimiento del robot y el modo de acción con el comando serial.
Siguiendo instrucciones para los comandos seriales:

Paso 8: Programación de la CAM ESP32
Ahora es momento de programar la ESP32 CAM para transmitir video en tiempo real. Sigue este tutorial para conectar la ESP32 CAM al puerto USB de tu laptop/computadora usando un programador FTDI.
https://randomnerdtutorials.com/codigo-de-carga-de-programa-esp32-cam/
Cree una carpeta llamada esp32cam-robot y guarde app_httpd.cpp,esp32cam-robot.ino.
Abra el archivo esp32cam-robot.ino en Arduino IDE.
Antes de cargar el código, debes insertar tus credenciales de red en las siguientes variables:
Luego, haga clic en el botón Cargar en su IDE de Arduino
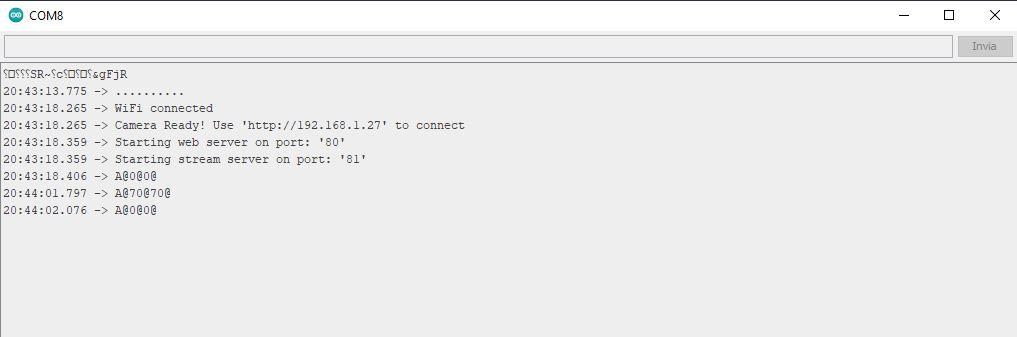
Cuando comience a ver algunos puntos en la ventana de depuración, presione el botón RST integrado del ESP32-CAM.
Después de unos segundos, el código debería cargarse exitosamente en su tablero.
Cuando vea el mensaje “ Carga finalizada ”, deberá quitar GPIO 0 de GND y presionar el botón RST para ejecutar su nuevo código.
En el monitor serie debería ver algo similar a esto. Anote la dirección IP del ESP32 .
Paso 9: Aplicación de Android


Ahora puedes usar la App desarrollada para controlar el Robot vía bluetooth y ver vídeo en tiempo real vía wifi.
Descargue el archivo apk de GitHub https://github.com/catosci/CatosciApp/blob/main/release/catosci.apk
Paso 10: ¡¡¡Genial!!!
¡Felicidades! ¡Tu robot ya es un FPV!