
$5,00
El IMU MPU6050 6 Grados de libertad es un circuito integrado que combina un giroscopio de 3-ejes y un acelerómetro de 3-ejes en el mismo chip, teniendo 6 grados de libertad(DoF).
El IMU MPU6050 6 Grados de libertad es un circuito integrado que combina un giroscopio de 3-ejes y un acelerómetro de 3-ejes en el mismo chip, teniendo 6 grados de libertad(DoF).
¿Para qué sirve el IMU MPU6050?
El MPU6050 es útil para sistemas de control, medición de vibración, sistemas de medición inercial (IMU), detección de caídas, sensor de distancia y/o velocidad o goniometría (medición de ángulos).
ESPECIFICACIÓN Y CARACTERÍSTICAS
- Voltaje de funcionamiento: 3.3V a 5V
- Chip: MPU-6050.
- Grados de libertad (DoF): 6
- Protocolo de comunicación: I2C
- Convertidor analógico a digital: 16 bit en todos los ejes.
- Rango
- Giroscopio: +/-250,+/- 500,+/- 1000 y +/- 2000° /s(dps)
- Acelerómetro: +/-2 ,+/-4 ,+/-8 y +/-16g
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
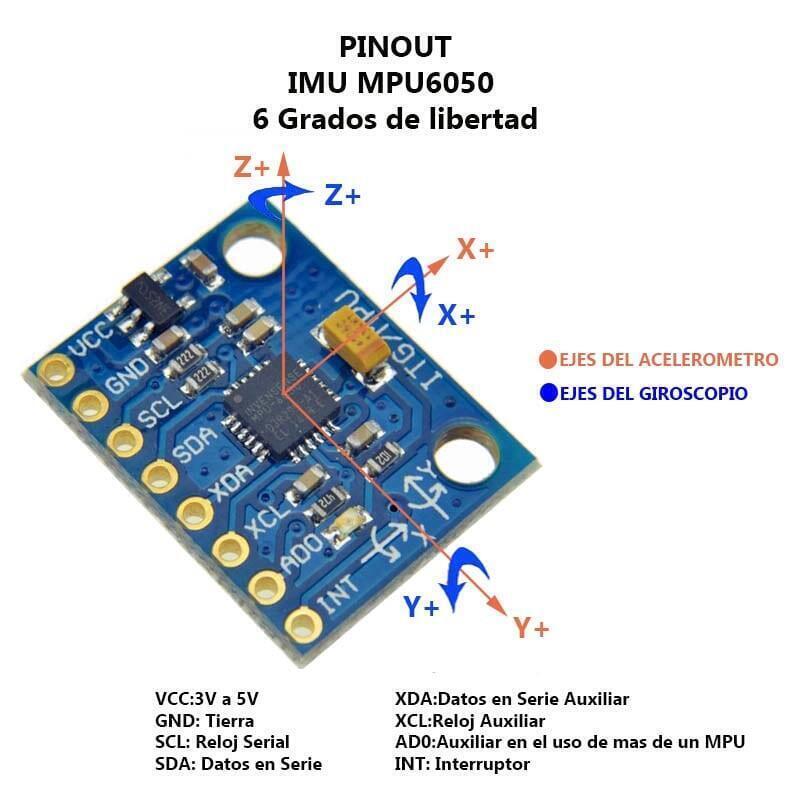
¿Cómo funciona el IMU MPU6050?
Este sensor se comunica a través de la interfaz I2C, cuenta con un regulador de tensión a 3.3V (por lo cual se puede alimentar con los 5V de placas de Arduino).
Las direcciones para poder trabajar en I2C son:
| PIN AD0 | Dirección I2C |
|---|---|
| AD0=HIGH (5V) | 0x69 |
| AD0=LOW (GND o NC) | 0x68 |
Esto permitirá usar dos dispositivos en el mismo bus o en caso de que haya un conflicto de dirección con otro dispositivo en el bus. A continuación las conexiones para usar el dispositivo en Arduino UNO:
 Conexión del Arduino a MPU-6050 para interfaz de I2C
Conexión del Arduino a MPU-6050 para interfaz de I2C
Código de prueba para MPU-6050 GY-521
Se presenta el siguiente código con la finalidad de que puedas probar el funcionamiento del MPU , cabe mencionar que se requiere calibración y los datos arrojados son de fabrica. Para mas información revisar el datasheet.
#include "Wire.h" //Librería para poder comunicarse con dispositivos por I2C
const int MPU_ADDR = 0x68; // Dirección I2C del MPU-6050. Si AD0(0x69) HIGH, de lo contrario I2C(0x69)es LOW
int16_t a_x, a_y, a_z; // variables para el acelerómetro
int16_t g_x, g_y, g_z; // variables para giroscopio
int16_t t; // variables para temperatura
char tmp_str[7]; // variable temporal con 7 carácters
char* convert_int16_to_str(int16_t i) { // variables para conversión de int16 a texto
sprintf(tmp_str, "%6d", i);
return tmp_str;
}
void setup() {
Serial.begin(9600);
Wire.begin();
Wire.beginTransmission(MPU_ADDR); // Comienza la comunicación entre GY-521 por I2C
Wire.write(0x6B); // registro para direcciones
Wire.write(0); // empieza en cero (encender MPU-6050)
Wire.endTransmission(true);
}
void loop() {
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x3B); // se empieza con el registro 0x3B salida del acelerómetro(ACCEL_XOUT_H)
Wire.endTransmission(false); // Parámetro que indica que el Arduino mandara reset. O se mantendrá la conexión activa.
Wire.requestFrom(MPU_ADDR, 7 * 2, true); // solicitud de 14 registros
// "Wire.read()<<8 | Wire.read();" significa 2 registros son leídos y guardados en la misma variable
a_x = Wire.read() << 8 | Wire.read(); // lectura del registro para acelerómetro: 0x3B (A_XOUT_H) y 0x3C (A_XOUT_L) (HIGH/LOW)
a_y = Wire.read() << 8 | Wire.read(); // lectura del registro: 0x3D (A_YOUT_H) y 0x3E (A_YOUT_L)(HIGH/LOW)
a_z = Wire.read() << 8 | Wire.read(); //lectura del registro: 0x3F (A_ZOUT_H) y 0x40 (A_ZOUT_L)(HIGH/LOW)
t = Wire.read() << 8 | Wire.read(); // lectura del registro para temperatura: 0x41 (T_OUT_H) y 0x42 (T_OUT_L)(HIGH/LOW)
g_x = Wire.read() << 8 | Wire.read(); // lectura del registro para giroscopio: 0x43 (G_XOUT_H) and 0x44 (GYRO_XOUT_L)
g_y = Wire.read() << 8 | Wire.read(); // lectura del registro: 0x45 (G_YOUT_H) and 0x46 (G_YOUT_L)
g_z = Wire.read() << 8 | Wire.read(); // lectura del registro: 0x47 (G_ZOUT_H) and 0x48 (G_ZOUT_L)
// Impresión de la información
Serial.print("aX = "); Serial.print(convert_int16_to_str(a_x));
Serial.print(" | aY = "); Serial.print(convert_int16_to_str(a_y));
Serial.print(" | aZ = "); Serial.print(convert_int16_to_str(a_z));
Serial.print(" | tmp = "); Serial.print(t / 340.00 + 36.53); // ecuación recomendada en el datasheet para la temperatura
Serial.print(" | gX = "); Serial.print(convert_int16_to_str(g_x));
Serial.print(" | gY = "); Serial.print(convert_int16_to_str(g_y));
Serial.print(" | gZ = "); Serial.print(convert_int16_to_str(g_z));
Serial.println();
// espera 1s para la siguiente lectura
delay(1000);
}
ENLACES EXTERNOS
Productos relacionados
-
$15,00Vista rápida
El Sensor Huella As608 es un sensor biométrico, permite realizar sistemas de procesamiento digital de imágenes de manera interna con un DSP (Procesador de Señales Digitales). Además incluye capacidades de comparación en base de datos y actualización de la misma. El dispositivo funciona con el protocolo serial, por lo que puede ser utilizado con cualquier microcontrolador o tarjeta de desarrollo.
-
$6,00Vista rápida
-
$4,61Vista rápida
El Modulo HX711 Sensor de presión, es un convertidor analógico – digital (ADC) de precisión de 24 bits. Así mismo el muestreo del módulo tiene una resolución de conversión que va desde un valor 0 a 167,772,15 datos. Es por ello que el valor cero corresponde a los 0 volts y el valor de 5 volts al valor máximo de muestreo. Finalmente esté módulo es compatible con las celdas de carga con valores desde un 1 Kg, 5 Kg y 10 Kg.
-
$9,70Vista rápida
Display Oled SSD1306 I2C de 128×64 0.96 es un dispositivo electrónico tipo led, que permite controlar cada píxel individualmente y mostrar tanto texto como gráficos. Además por ser de tipo OLED no necesita de retroiluminación (Backlight) como los LCD, lo que hace que su consumo de energía sea mucho menor y aumenta su contraste.
-
$6,20Vista rápidaEste es un módulo de terminales block para Arduino Nano. Es compatible con la versión 3.0, sin embargo, aún puede usar este módulo con la versión anterior (solo debe recordar que A0-A7 están en el orden inverso). Puede usar este módulo para conectar fácilmente el Arduino Nano a un mundo exterior a través de cables de conexión. Solo tienes que usar los opresores para sujetar y soltar los cables de conexión.




Valoraciones
No hay valoraciones aún.